Abstract
Gravel roads cannot be considered similar to paved roads because of the nature of the sublayer and the top formation. Based on the design and the application requirements of the automated vehicles, much information reveals that the gravel roads do not support the application to a greater dimension. Gravel roads are designed differently, operating uniquely, interfering with the data required in running and maintaining the vehicles. The automated vehicle navigation systems are not supported. The next difference is that the roads do not have a more compatible maintenance system, and many differences can be described based on that. Therefore, it is necessary to ensure that paved roads are preferred for every form of construction and that only the transformed gravel roads are used for automated vehicles. Gravel roads do not support vehicles, making it necessary to create a newer road system that has well-defined applicability. The road system is key in defining the kind of vehicles considered applicable.
Background
Professor Scott Bunyan approached me in January to conduct a research project focusing on Automated Vehicles (AVs) and/or Connected Vehicles (CVs) and/or Smart Infrastructure.
This report is addressed to TAC as its conclusions and recommendations could apply to federal, provincial and municipal governments, manufacturers and researchers; as TAC counts all of these groups among its members (TAC, 2017), addressing the report to TAC ensures both distribution of my insights among those stakeholders, and also provides a forum in which those recommendations could be discussed.
Introduction
As a relatively new technology, AV research has understandably focused on the effectiveness of AV operations in ideal driving conditions, and/or in closed systems rather, than on shared public roads. The near-perfect driving climate of Phoenix, AZ has attracted a significant proportion of the key AV companies in North America: “Chrysler, Cruise Automation (GM), Ford, General Motors, Intel, Local Motors, Lucid Motors, Nikola Motors, Nissan, NXP Semiconductors, ON Semiconductor, Toyota, Volkswagen, [and] Waymo” (Greater Phoenix Economic Council, undated). Testing in areas like Phoenix allows researchers to limit the impacts of inclement weather both on AV sensor systems and on roadways. Moreover, there are a range of private road testing facilities for AVs, such as the facility in Nepean, ON which opened in 2019 (Whan, 2019); these allow researchers to control the circumstances in which AVs operate. The fundamental common thread in both types of testing above, though, is the operation of AVs on paved roads with directional dividing lines and lane edge lines. In Ontario in 2003, paved roads represented only 62.8 % of the total length of Ontario’s public road network, and only 39.9% of the total length of Canada’s public roads (Statistics Canada, 2015). In my research, therefore, I decided to focus on AV performance on the most common variety of the other 37% of Ontario’s public roads: gravel roads. My report assesses whether current or near-future AVs can navigate gravel roads.
My research relies on data from peer-reviewed journals, and research from educational, professional and private sectors. This is complemented by a survey of Ontario drivers to assess the correlation between contemporary public opinion and research trends, and augmented by interview with Professor Irene Amog, a specialist in pavements with more than 25 years of experience in the construction materials industry. This allows me to evaluate contemporary gravel road construction standards and variations in the building and maintenance of individual gravel roads, to consider how AV systems designed to navigate paved roads can interpret such gravel roads, and to explore whether the inclusion of additional sensors and/or pre-scans and/or machine learning-supported offroad wayfinding can allow AVs to operate autonomously on gravel roads, even if only in limited circumstances.
My project considers only public gravel roads, though, focusing on well-made public gravel roads with average vehicular traffic. I do not include private gravel roads, or gravel roads with systemic issues in design and/or maintenance, or failures due to extreme weather events (flash-flooding, forest fires etc.) or issues arising from transit of heavy haulage.
In my Analysis section, I consider the following:
- Gravel road design and construction
- Challenges posed by gravel roads to key AV systems
- Function of AV sensor suites in the absence of pavement markings on gravel roads
- AV pre-scanning systems in the absence of pavement markings on gravel roads
- Offroad AV navigation systems on gravel roads
Analysis
Gravel road construction and maintenance are complex and interlinked processes. To understand whether different AV sensor suites can navigate such roads it is critical to understand both the construction and maintenance processes.
Gravel Road Construction Stages
Construction can be broken down into eight stages:
- Assess road use, and design to accommodate heaviest vehicles and heaviest traffic volumes in the worst possible weather conditions while choosing a route which avoids existing hazards such as waterlogging and minimizes camber.
- Identify and source the best materials for both subgrade (road base) and aggregate (gravel) layers.
- Contract experienced operators with good quality and well-maintained laying and grading machinery to create and shape the subgrade and lay aggregate layers
- Compact soil surface beneath the base.
- Create ditches with adequate foreslope and backslope angles and sufficient depth below subgrade to encourage proper draining and a flowline that can keep worst-case rainfall from pooling on the gravel road surface
- Construct a stabilized subgrade which follows the correct straight camber cross section.
- Lay and spread aggregate mixes with adequate durability and plasticity and with sufficient surface fines to ensure smooth driving surface and sufficient gravel coherence
- Grade to maintain medial crown, equal crossfalls for drainage and sharper shoulder angles to accelerate surface water passage to the ditch. (Federal Highway Administration, 2015. Rashedi et al., 2018. KH Plant, undated)
Figure 1 shows a cross-section of such a gravel road.
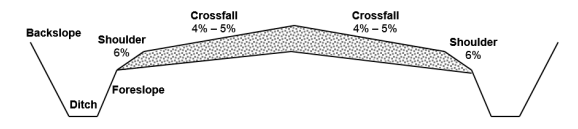
Figure 1: Cross-section of Gravel Road and Lateral Ditches
(Rashedi et al., 2018)
As we can see from Figure 1, the requirements for the planning and construction of gravel roads are less stringent than the requirements for the planning and construction of paved roads, though there are still a significant number of variables which have to be taken into consideration. In our interview (see Appendix 2) Professor Irene Amog drew on her 25 years of experience in construction materials industry, explaining that gravel roads are constructed when traffic volume does not warrant the significantly greater expense of a paved road (Amog, interview, 2021). With cost savings thus prioritized, and with municipal governments in Ontario bearing the financial responsibility for construction and maintenance of gravel roads (Rashedi et al, 2018), it is unsurprising that Amog identified significant variation in gravel road construction between municipalities, particularly in terms of aggregate used, with municipalities prioritizing use of locally-sourced aggregate in order to keep down the cost of transporting materials. Amog notes that Northern Ontario is a source of excellent quality aggregate for gravel roads, but, factoring in the cost of shipping, there is an increasing likelihood that the further south the gravel road lies, the less likely it is that the best Northern aggregate is used in construction (Amog, interview, 2021).
Gravel Road Construction and Maintenance Issues
A short list of the issues which can arise as a result of poor design and/or material choice and/or construction of gravel roads affords worrying range of potential driving issues:
- If subgrades are soft, they might not be able to support gravel roads without significant alteration, such as removing soft material through excavation and replacing with new material, possibly even requiring an additional geotextile or geosynthetic material to separate soft subgrade from the new material.
- Once the subgrade is of sufficient quality, the Federal Highway Administration offers a clear definition of the range of materials required for the gravel surface “Good surface gravel has the appropriate percentage of stone, or coarse aggregate, which gives strength to support loads — particularly in wet weather conditions. It also needs an appropriate percentage of sand-sized particles, or fine aggregate, to fill the void between the stones to provide stability. The final requirement is an appropriate percentage of plastic, very fine particles to bind the material together which allows a gravel road to form a crust and shed water” (2015). If the predominantly locally-sourced aggregate is lacking in any of these elements, or if the proportions of each is imbalanced, then the gravel road’s surface and durability will be compromised.
- During construction and maintenance, grader operators must control operating speed (3-5 miles per hour being the common maximums) and moldboard angles (commonly between 30 and 45 degrees) to maintain straight camber road geometry as shown in Figure 1, while also ensuring optimal mixture of the aggregates mentioned above.
- Higher speeds induce bounce in the grader, which creates indentations and leaves edges in surfaces which should be smooth.
- Pitching the moldboard too far forward results in light scraping and does not shape or compact the surface adequately, while pitching the moldboard too far back reduces mixture of aggregates and results in excessive loss of material
- Dust abatement and stabilization are required to enhance driver safety and to reduce erosion, with most methods requiring yearly application of liquids and/or solids to the road surface.
- The crown on the gravel road needs to be sufficient to allow drainage to both ditches, while not being so high as to encourage vehicles to drive on the crown due to fear of slippage; Figure 1 establishes the common acceptable range of 4-6% crossfall.
- If the crown is too low, drainage is ineffective, and potholes and corrugation of the surface will develop, which can be exacerbated by damage to the surface caused by excessive grader speed.
- If the crown is too high, then vehicles risk losing traction on the crossfall, encouraging drivers to drive on the crown.
- Over time, the crown on even even well-constructed straight camber road geometries will tend to become parabolas due to usage and shifting of aggregates. If this is not redressed through regular maintenance, it reduces drainage in the centre of the roads, leading to the potholes and corrugation in the centre of the road.
- Curves on gravel roads need to transition from normal crown to a straight superelevated surface then back to a crown once the curve is over. If this superelevation exceeds a 6% slope, vehicles run the risk of sliding into the ditch when navigating the corner.
- Foreslopes on ditches need to be of sufficient depth and gradient, and the ditch needs to prevent standing water from forming anywhere on the cross section, as standing water can result in significant failure of road surface and subsurface
- Heavy loads passing over even well-constructed and maintained gravel roads, especially during wet conditions, damage the surface and the crown and crossfall shape due to the looseness of the aggregate combined with the relatively weak subgrade strength (when contrasted with paved roads).
- Formation of secondary ditches and ruts is common on gravel roads, and accumulation of water in these can quickly result in failure of the road surface and even fundamental altering of the road’s cross section as the water softens both aggregate and subgrade layers. (Federal Highway Administration, 2015)
As we can see, if gravel road planning and construction are not carefully carried out, and if maintenance cycles are not regular, and if road surfaces are not examined regularly significant issues can arise very quickly.
Although this only briefly touches on the basics of gravel road construction, maintenance and hazards, a complete consideration of these issues is beyond the scope of this project. It is worthwhile establishing, however, the changing conditions of gravel road travel over time in order to suggest the range of barriers faced by AV systems on gravel roads. For the purposes of this project, as AVs are still in the testing phase, the analysis will focus on AVs’ ability to navigate well-designed, well-built and well-maintained gravel roads, acknowledging that navigation of optimal gravel roads represents a significant challenge that AV designers must overcome before research can begin into operation of AVs on poorly designed and/or poorly constructed and/or poorly maintained gravel roads.
As Amog explained, there is no current road marking or marker system for gravel roads which would approximate the function of directional dividing lines and/or edge lines on paved roads (Amog, Interview, 2021). As the next sections will show, AV systems rely heavily on recognition and mapping of such lines in order to function autonomously.
Viability of AV Navigation Systems on Gravel Roads
AV navigation systems ensure that the automated vehicles operate effectively and smoothly based on the circumstances presented. They operate by ensuring that much of the required information and needs are met. The systems are designed to drive the process, and the viability on gravel roads is of prime concern. Gravel roads can be considered incomplete, and most of the systems require complete roads designed to operate automatically (Rashedi et al., 2018). The nature and concern required are for the roads to develop the capacity to support these driving systems. The navigation systems can be considered part of the major drivers of the vehicles, making them key in determining the use of the roads for the desired functions. The driving factor in such a platform is the definition of a direct support system that can effectively support such operations. Much of the required qualities can only be tested if the roads qualify for analysis after supporting the vehicle drivers. AVs cannot operate without navigation systems, making the investigation process heavily dependent on the findings based on the supportive components (Whan, 2019). The cameras and every other component applicable in ensuring the AVs move and operate effectively are designed to operate only on specific roads. Therefore, the section analyzes the viability of the systems on the roads, which can be used to determine if indeed the roads can support automated vehicles.
Real-Time Processing of Cameras and Radar/LiDAR for Navigation
Real-time processing cameras are designed to ensure the information that is input is equally output. The systems ensure that only relevant input information can be channeled for effective action. The systems are designed to operate by granting information concerning the traffic controls and much that could be done to ensure the traffic strategies and states are maintained (Whan, 2019). The need to ensure better management systems of the traffic controls and develop better strategies depends on the input and output of the cameras.
Real-time processing of cameras refers to operating cameras using computer data that is entered. The data identified by the computers are used and designed to give the relevant direction, particularly the traffic information. Such operations are designed for specific locations and operational parameters. It may not be directly relevant, but the location and site characters matter concerning the nature of information processing.
The kind of roads can influence the processing of cameras that are key for navigation. The navigation system depends on the terrain of the land, making it key to investigate the nature of the roads (Rashedi et al., 2018). Gravel roads can interfere with the signals based on the terrain, making the process and functions ineffective. Therefore, the systems cannot be considered viable on gravel roads.
Pre-Scanned Roadways, Plus Cameras and LiDAR for Navigation
Automated vehicles depend on the nature of the roads for navigation. Everything about their operations depends on the laid states of movement, where the preparation and every related activity depend on the roads and cameras (Whan, 2019). The nature of the roads is tested at specific periods and intervals, depending on the distance and speed of the automotive.
Pre-scanning refers to the analysis of the roadways before the movement of the vehicles. It refers to the journey made before the actual movement of the automotive. Like every other camera, the cameras and every input used in the system are designed to translate raw data. The data needs clear coverage to achieve the best form of interpretation. However, the challenge is introduced when the cameras are blocked and possibly damaged by the gravel particles. Also, maintenance of the technical input designed for operating the machines can be considered difficult.
LiDAR systems use radiations and light-sensing machines to perform the required monitoring tasks. The movement of such detectors should be streamlined to the desired information, where only the most relevant form of information is captured (Whan, 2019). However, the results may not be considered that simple if the paths are unclear and cause unnecessary feedback. The feedback can be considered drawn from a specific perspective where everything works in alignment to a specific direction. However, gravel particles and unclear paths create a lot of commotion and possible damage to the equipment, making the viability results negative.
High-Resolution GPR Pre-scanning Road Subsurface, Plus Cameras, LiDAR, and GPR for Navigation
Ground Penetrating Radars (GPR) operate by creating a monitoring platform for the desired activities and processes. The major activity involves an analysis of the sub-surface using radar readers and detectors. GPR systems fully rely on the ground where the reading is conducted. They operate by ensuring that the subsurface is clear and ready for supporting the automated vehicle.
The high-resolution pre-scanning process refers to the application and use of a more sophisticated approach in defining the success of such activities. The pre-scanning process ensures that all forms of road ineffectiveness are eradicated and that only the smooth flow of the vehicles can effectively take place (Rashedi et al., 2018). However, the challenge with gravel roads is that they are uneven, making the feedback inaccurate because of requiring high levels of cool environment.
The pre-scanning process is hampered because the GPR devices cannot penetrate deep enough and arrive at accurate conclusions because of the gravel challenges experienced. Gravels cause interference on the radiators, and they do not support applying such processes in the field (Whan, 2019). Gravel comprises uneven particles, and such roads form an uneven platform, where there is the separation of the well-defined standards and platforms. The result is the loss of accurate information, making the navigation systems hampered and less operational.
High-resolution mapping combined with Cameras and LiDAR Optimized for Off-road Navigation
Mapping refers to creating a well-defined path, where every activity is directed towards generating information on the terrain and direction to be made. High-resolution mapping combines the information obtained from cameras, GPS, and the LiDAR systems to define what to expect (Whan, 2019). No navigation can happen without a defined mapping system, and the systems operate to ensure that accurate direction and understanding of the region are maintained.
Off-road navigation refers to the movement beyond the normal roads, into places having hills and shrubs, intending to arrive at a particular region. The nature of activities that occur in the process involves using well-defined systems to stabilize the movement. High-resolution mapping that has more advanced features is required. However, consistent data is required for mapping to be established and followed.
Gravel roads involve a lot of interferences, where the data collected cannot be interpreted by the computer systems effectively. Interference results from inconsistent results drawn from multiple sections and platforms. Such roads do not support the consistent nature of the results, making it unnecessary to merge the information for mapping (Rashedi et al., 2018). Also, paying attention to the details may not be possible because of the interferences created in every level of analysis. Therefore, gravel roads do not support the systems and may not be the best option for mapping and navigation.
Figure 2: Distribution of Automated Vehicles
(Rashedi et al., 2018)
As Figure 2 suggests, automated vehicle usage is diverse and can be classified based on the class of roads.
Figure 3: Gravel Roads

(Whan, 2019)
Figure 3 shows the nature, design, and maintenance of gravel roads.
Figure 4: Automated Vehicles

(Rashedi et al., 2018)
Figure 4 shows the viewpoints of automated vehicles and their possible uniqueness that cannot be applied on gravel roads.
Conclusion
Gravel roads are constructed uniquely and distinctly. They comprise roads constructed out of a detailed analysis and perfection of certain results using the available information and practice. Gravel roads are constructed in a specific design that may not effectively support automated vehicles. The building and operational designs are not in line with the operation of such vehicles. Such vehicles require specific roads that are not in line with the unique nature and appearance of the gravel roads. Also, the roads do not support the navigation systems of automated vehicles. There can never be movement of automated vehicles without adequate support of the navigation systems. The systems act as the drivers of the entire operation, making them key in the movement processes. Therefore, many modifications are required to ensure that the systems are supported, which may not be very possible for gravel roads.
Recommendations
Gravel roads are poor for the operations of automated vehicles. There is the need to ensure that most of the desired requirements are met before completely including the processes. Everything concerning the required platforms and environment points to a different designation and location. The knowledge from the research indicates that there is little connection between gravel roads and automated vehicles. The relationship cannot be defined as a connection, making it more understandable that they are incompatible. Based on the research, automated vehicles are designed to operate in smooth environments. Therefore, every requirement to design and operate automated vehicles should be on paved roads. The difference is in the nature of the surfaces, where paved roads favor the desired conditions. Paved roads are more advisable because they are designed to support such actions. The roads are more even and can easily support the navigation systems, creating an advantage compared to the gravel roads.
References
- Federal Highway Administration. August 2015. Gravel Roads Construction & Maintenance Guide. https://www.fhwa.dot.gov/construction/pubs/ots15002.pdf
- Greater Phoenix Economic Council. Undated. Autonomous Vehicles. https://www.gpec.org/industries-operations/industries-in-greater-phoenix/autonomous-vehicles/
- KH Plant. Undated. Building a Great Gravel Road: 10 Basic Principles. https://www.khplant.co.za/blog/article/building-great-gravel-road-10-basic-principles
- Rashedi, Roozbeh et al. 2018. Defining Needs for Optimized Management of Gravel Road Networks. Transportation Association of Canada Conference. https://www.tac-atc.ca/sites/default/files/conf_papers/rashedi_r-_defining_needs.pdf
- Statistics Canada. 2015. Table 1: Length of Canada’s public road network, 2003. https://www150.statcan.gc.ca/n1/pub/16-002-x/2009001/tbl/transpo/tbl001-eng.htm
- TAC. 2017. Transportation Association of Canada: Strategic Plan. Available https://www.tac-atc.ca/sites/default/files/site/doc/about-us/tac_2017strategicplan_en.pdf
- Whan, Christopher. May 17, 2019. First testing facility for fully automated vehicles in Canada officially opens in Nepean. https://globalnews.ca/news/5289581/fully-automated-vehicles-testing-facility-nepean/
Appendices
Appendix 1: Survey
- What is your age?
-
- 0-16
- 17-25
- 26-35
- 36-45
- 46-55
- 56-65
- 66 or older
- I prefer not to answer.
- What kind of driver’s license do you have?
-
- Class A-F
- Class G
- Class G2
- Class G1
- Class M
- Class M2
- Class M1
- I do not have a driver’s license.
- I prefer not to answer.
- For how many years have you held your driver’s license?
-
- 0-2 years
- 3-5 years
- 5-10 years
- 11-15 years
- 16-20 years
- 21 years or more
- I do not have a driver’s license.
- I prefer not to answer.
- Roughly how far do you drive in an average week?
-
- I do not drive
- Less than 50 kilometres
- 50-99 kilometres
- 100-149 kilometres
- 150-199 kilometres
- 200-249 kilometres
- 250-299 kilometres
- 300 kilometres or more
- I prefer not to answer.
- How frequently do you drive on gravel roads?
-
- 7 or more times per week
- 2-6 times per week.
- 1-7 times per month.
- 1-4 times this year
- I have driven on gravel roads but not this year
- I have never driven on gravel roads
- Do you have to travel by gravel roads to reach your place of residence and/or your place of work and/or your place of study?
-
- Yes
- No
- I prefer not to answer
- If you have driven on gravel roads, in what ways are gravel roads more challenging than paved roads? Please select all that apply.
-
- Reduced traction due to loose surface material.
- Absence of directional dividing lines
- Absence of edge lines
- Reduced lane width.
- Narrow or no shoulder.
- Steep inclines which break line of sight.
- Sharp turns which break line of sight
- Hidden intersections
- Dust obscuring vision
- Signs hidden behind foliage
- Signs are more difficult to recognize (smaller, faded, non-standard design, damaged)
- Driving on gravel roads is as easy as driving on paced roads.
- If you selected one or more challenges for the previous question, which do you think represents the greatest challenge?
-
- Reduced traction due to loose surface material.
- Absence of directional dividing lines
- Absence of edge lines
- Reduced lane width.
- Narrow or no shoulder.
- Steep inclines which break line of sight.
- Sharp turns which break line of sight
- Hidden intersections
- Dust obscuring vision
- Signs hidden behind foliage
- Signs are more difficult to recognize (smaller, faded, non-standard design, damaged)
- I did not select any challenges for the previous question.
- If you have driven on gravel roads, what forms of maintenance are necessary? Please select all that apply.
-
- Cross section reshaping
- Moldboard regrading
- Road shoulder maintenance.
- Ditch maintenance
- Drainage remediation
- Maintenance of intersections with other gravel roads
- Maintenance of intersections with paved roads
- Addition of surface gravel to replenish gravel lost through traffic action
- Windrowing, equalizing and spreading of new gravel
- Use of stabilizers for dust control
- When you are driving on paved roads, how safe do you feel on average?
-
- I feel very safe.
- I feel somewhat safe.
- I feel neither safe nor unsafe.
- I feels somewhat unsafe.
- I feel very unsafe.
- When you are driving on gravel roads, how safe do you feel on average?
-
- I feel very safe.
- I feel somewhat safe.
- I feel neither safe nor unsafe.
- I feels somewhat unsafe.
- I feel very unsafe.
- How would you define your familiarity with Automated Vehicle (AV) technology?
-
- I am very familiar.
- I am somewhat familiar
- I am neither familiar nor unfamiliar.
- I am somewhat unfamiliar.
- I am very unfamiliar.
- Do you agree with the following statement? AVs can operate safely on unpaved roads without driver monitoring.
-
- I strongly agree
- I agree.
- I neither agree nor disagree.
- I disagree.
- I strongly disagree.
- Do you agree with the following statement? AVs can operate safely on unpaved roads so long as a driver is paying attention and ready to assume manual control of the vehicle.
-
- I strongly agree
- I agree.
- I neither agree nor disagree.
- I disagree.
- I strongly disagree.
- In your opinion, are gravel roads safe as they are now, or should municipal governments increase the frequency and extent of maintenance of gravel roads to make them as safe to navigate as paved roads, or should municipal governments focus on paving gravel
Appendix 2: Interview with Professor Irene Amog, Mohawk College on October 13, 2021
- Statscan shows that in 2003 a little over 37% of Ontario’s public road network was unpaved roads. Do we know what percentage of the total distance driven by Ontario drivers is driven on gravel roads?
- What are the strengths of gravel roads from a construction and maintenance standpoint?
- Are Ontario’s gravel road construction standards sufficient? If not, what changes need to be made?
- What are the gravel road repair and maintenance challenges faced by municipalities?
- Would gravel road maintenance be improved if it were managed provincially rather than municipally?
- What are the factors which determine that a gravel road be replaced by a paved road?
- Do you see the current proportion of paved to gravel roads in Ontario changing? Why?
- Is there any feasible method to approximate the function of directional dividing lines and/or edge lines on gravel roads?
- Could AV cameras/LiDAR/RADAR detect the peak of the cross-section at a gravel road’s midpoint and the shoulder without the need for additional markers?
- Research is currently ongoing into the use of ultra-wider band Localizing Ground-Penetrating Radar (GPR) to premap non-paved paths and roadways to a depth of 2-3 m to allow GPR-equipped AVs to follow the same precise path; would changes to the gravel surface of the gravel roads in regular maintenance or alterations to the subgrade in more significant repairs cause problems for this kind of system?
- Another gravel-road AV model relies on the use of intersecting LIDAR sensors and cameras with both simulator and test-track to train AI algorithms to allow an AV to differentiate between open paths and obstacles; do you think this could work with freshly maintained gravel roads? Would this change if the gravel road has maintenance and design issues as washboarding, standing water, superelevation or issues with surface gravel (too much stone and sand in proportion to the fine material)?
- A third method involves the use of high-resolution GPS in conjunction with georeferencing to allow AVs to navigate gravel roads; can you see limitations to GPS functionality or issues with georeferencing?
- What means of dust control and stabilization are in common use on Ontario’s gravel roads? Are these methods effective?
- Are there any innovations in gravel road design and maintenance which could benefit AVs?
 write
write