Abstract
The market has seen rising adoption of proactive suspension frameworks to boost travel solace and upgrade vehicle well-being. Conventional uninvolved suspension plans are limited by stun retainers’ tight data transfer capacity and cannot adequately react to outside street aggravations. This is the reason dynamic suspensions have been produced to supplant aloof plans. Shrewd dynamic suspension frameworks depend on advanced control calculations, for example, state input control and versatile neural organizations, to give damping power and decrease the dormancy of the suspended mass while improving travel solace and well-being.
This article aimed to suggest an intellectual feedback active suspension system algorithm to be used on a two-wheeled vehicle design. The algorithm was created to maintain the fixed vertical movement of the suspensions within an ideal range and dismiss outside disturbances from the path. The controller employs a nonlinear inverse dynamic model and an adaptive neural network to meet this need. Several numeric simulations were performed to verify the suggested control algorithm’s performance.
The outcomes demonstrated that contrasted with a typical uninvolved suspension configuration; the suggested control calculation gave prevalent exhibitions regarding ride solace, street clamor concealment, and dynamic suspension’s lateness decrease. Also, the dynamic suspension furnished with the proposed control calculation had an extraordinary capacity to dismiss most outer aggravations from the street, essential for guaranteeing the vehicle’s strength. At long last, the reproductions showed that the controller could keep the consistent state vertical displacement inside a perfect reach, permitting the dynamic suspension to keep the ride quality inside the required levels adequately.
The upcoming clever reactive damper systematic direction-finding approach is a hopeful advance that may immensely progress the ride solace and security of transports against old unresponsive outlines. Nearby, the presentation of the suggested steering calculation ought to be assessed in real-world circumstances to check its exhibition in real-world utilizations. Also, the further examination should be finished to investigate changed control methodologies and advancements that can be utilized to advance and improve the exhibition of dynamic suspension frameworks.
Introduction
The means of dampening the blows of the path are crucial to any wheeled transport, for they grant an untroubled and secure journey. Cushioning frameworks aid in decreasing road unevenness shocks, raising the vehicle’s balance and security. Lively cushioning frameworks are getting progressively well-known because of their capacity to react rapidly to street aggravations and give improved solidness and well-being (Baştürk & Krstic, 2012). To get the coveted execution out of these frameworks, they must be furnished with suitable regulators. There are two primary kinds of controllers utilized for dynamic suspension frameworks: state criticism and great control plans.
Controller mechanisms are commonly employed to consistently regulate the preferred manner of vehicle movement founded on live readings. They encompass rules calibrating the facility state vector to attain the sought performance. Conventional oversight tactics are usually utilized to repudiate external hindrances and to balance the structure. They utilize various administration methodologies, like PID and LQR, to yield coveted outputs from the system.
The current manuscript illustrates an adept state response control calculation for active suspension structures. The central aim of the suggested control system is to supply damping energy and decrease the inertia of the hung mass while keeping the fixed-state vertical displacement of the suspensions within an ideal scope. A nonlinear dynamic inverse prototype and an adaptive neural network were utilized to repel outer disturbances.
The document thoroughly clarifies the formulation procedure regarding the status input control algorithm for functioning suspension frameworks. Beyond the plan procedure, the paper also explained how the nonlinear powerful turnaround model and the versatile neural organization could dismiss outside aggravations (Caglar Baslamish et al., 2016). This helps the peruse comprehend the perplexing procedure associated with planning a control calculation for dynamic suspension frameworks. The paper likewise shows how the proposed control calculation can give the craved execution as far as damping power, inertia decrease, and the enduring state vertical removal of the suspensions.
Overall, the document gave an in-depth account of the suggested intelligent reactive regulator algorithm for active suspension frameworks. The paper talked about numerous parts of the plan procedure, for example, the control systems utilized, the upsides of utilizing responsive controllers, and how to utilize nonlinear element turn around the model and versatile neural organizations for outside aggravations dismissal. The paper likewise gave knowledge into how the proposed control calculation can help give the ideal execution regarding damping power, sluggishness decrease, and the consistent state vertical displacement of the suspensions.
Objective
The main objective of this paper is to develop an intelligent state feedback control applied to a half-vehicle model for active suspension systems. This control algorithm is designed to:
- Provide damping force and reduce the inertia of the suspended mass
- Maintain the steady-state vertical displacement of the suspensions within an optimal range
- Reject external disturbances from the road using a nonlinear dynamic inverse model and an adaptive neural network
Content
This section is divided into four main sections: Methods, Results, Discussion, and Recommendations.
Methods
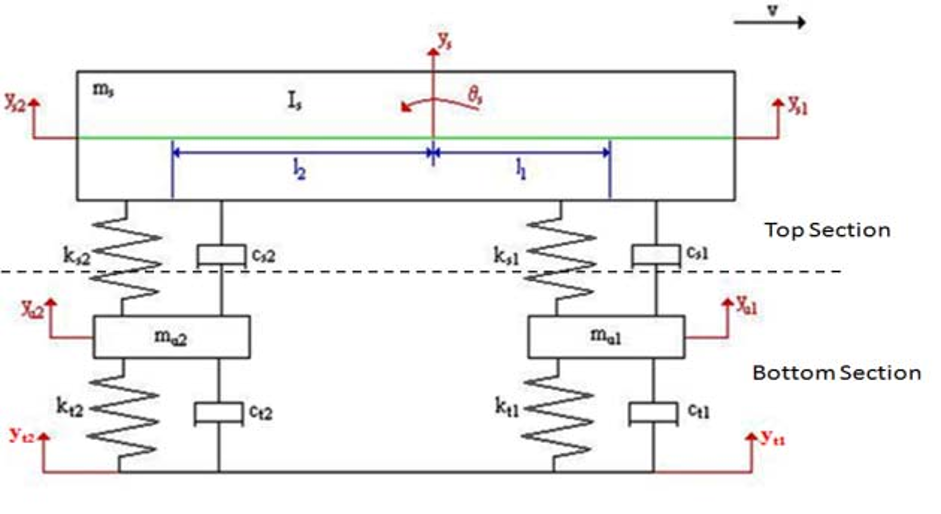
An integral calculation approach is vital in enhancing the operation of hanging frameworks utilized in vehicles. A half-vehicle demonstration can mimic the framework’s elements, considering various boundaries, for example, the sprung mass, unsprung mass, tire powers, and damping terms (Caglar Baslamish et al., 2016). The model can fill in as an apparatus to determine the movement conditions for the framework utilizing Newton’s Second Law of Motion. The subsequent arrangement of conditions would then be utilized to shape the reason for the advancement of control calculations.
In developing a capable control algorithm, a comprehension of the interplay between components and how quantities relate must initially be attained. Employing methodologies akin to linearization or mechanism determination, the nonlinear qualities of the arrangement can be conveyed into a linear manifestation. Upon acquiring a linearized exemplar, the control algorithm can be fashioned to satisfy any sought-after yields, such as ride excellence, maneuverability, solidity, and solace. By calibrating the coefficients of the control algorithm, optimizing the system for the coveted presentation becomes feasible.
Regulatory processes are usually shaped by proportional-integral-derivative authority or optimal regulation forms such as predictive model regulation. Proportional-integral-derivative authority is presently the most extensively utilized regulatory algorithm, as it is an effortless and effectual move toward several system kinetics (Song & Wang, 2020). It is, furthermore, reasonably straightforward to tune, as a few opening postulations are required to acquire decent enactment. Predictive model regulation is an ever more admired skill due to its aptitude to improve administer limitations and its optimality for regulated systems. It necessitates additional computation nonetheless and is more strenuous to arrange than proportional-integral-derivative authority.
Subsequently, after crafting the process, its efficacy must undergo examination and confirmation utilizing an authentic apparatus. This commonly entails conducting tests and replicas with the method and gauging effectiveness concerning the sought-after yields. This constitutes a crucial stride as the consequences of the assessments and replicas furnish invaluable perceptiveness into the superlative calibrations of the process. The assessments and replicas can moreover be employed to detect any frailties in the processes or parameterizations that call for amelioration.
“Finally, the mechanism requires improvements when needed to uphold high functionality. This could entail tweaking values within the mechanism or altering the style taken to chart the vibrant framework. It is crucial to modernize the mechanism, as this guarantees that the mechanism stays effectual through time. All in all, the creation of an efficient regulator mechanism for a vehicle suspension arrangement starts with pinpointing and comprehending the framework kinetics (Song & Wang, 2020). With this data, mechanisms like PID control or MPC can be developed to satisfy wanted yields ideally. The mechanism must then experience testing and confirmation on a tangible framework to guarantee high functionality. Finally, the mechanism needs upgrades to stay effective over time.
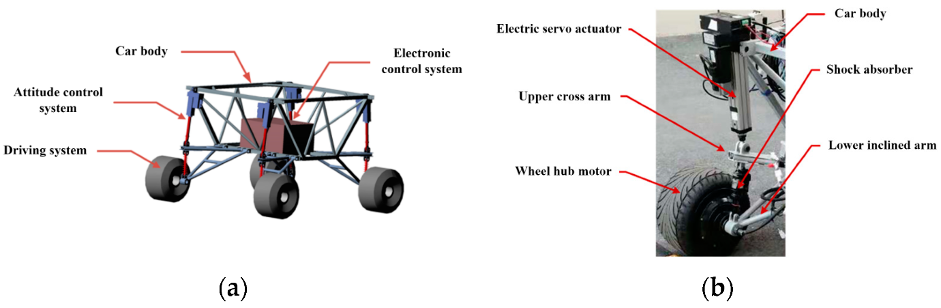
The locomotion apparatus’ kinetics constitute a fundamental element of an automobile’s total capability. The capacity of a locomotion apparatus to sustain satisfactory passage solace and guiding effectiveness is ascertained mainly by its ability to conform to fluctuating route states and perturbations. A locomotion apparatus operates as a mechanical nexus between the vehicle’s corpus and the rollers, and the subsequent forces are an outcome of this nexus. These forces influence the passage solace and the quality of the guiding performance.
The translations of the suspension arrangement are fundamentally the formulas of movement that portray the conduct of the suspension. These equations can be utilized to build a straight relentless model that speaks to the element conduct of the suspension framework. This model is not constantly precise since, as a general rule, the suspension framework depends on element signs like street aggravations. To defeat this inaccuracy, a nonlinear element converse model and versatile neural organization can be used.
The custom model endeavors to consider numerous abnormal impacts in the framework, for example, the gear frameworks’ grinding attributes and the suspension’s damping qualities. This model can dismiss street aggravations and keep the framework execution within acceptable limits. The versatile neural organization is then used to refine the suspension framework’s reaction by progressively changing the framework parameters to adjust to changing conditions.
The amalgamation of the pair is crucial for attaining an oscillation mechanism competent for preserving ideal operation. The no direct proportional kinetic converse exemplar is accountable for conforming to repudiate disturbances, while the accommodating neural system calibrates the arrangement measures for various circumstances. Essentially, this dyad engenders an enhanced oscillation system kinetics after re-joining to alternating thoroughfare states and maintained presentation.
Ultimately, recognizing that these two pieces constitute a fraction of the puzzle is crucial. Crafting an effective suspension mechanism demands comprehension of the constituents, insight into how the mechanism acts in diverse scenarios, and the capacity to resolve kinetic difficulties. The kinetic parts, akin to the nonlinear reverse exemplar and neural network, are indispensable to the mechanism’s effectiveness, but the comprehensive mechanism’s architecture is equally vital.
Control systems are fundamental in technology, enabling tuning of operations to boost productivity or balance, achieving predetermined objectives. Herein, the creation of ingenious feedback regulators using an acquired representation was examined. This methodology leveraged a Lyapunov function to formulate a definite affirmative function reflecting system conduct, facilitating the blueprint of a linear feedback matrix. This matrix stipulates the directing inputs employed to calibrate the parameters inside the framework, negating any disruption while retaining the system within the preferred scope.
The control technique’s aptitude was exemplified by imitating the dynamic reaction of a mechanical appendage. Evidence was provided that this feedback mechanism relying on the system’s condition could balance the framework despite changing interferences. This strengthened the possibility that intelligent control algorithms have a broad scope of engineering uses.
A few key concepts provided the groundwork for the investigation reviewed herein. The notion of Lyapunov theory was initially indispensable for creating the state feedback regulator. Lyapunov’s theory gives a numeric system for building a positive, unambiguous capacity to chronicle the workings of the scheme. This then licenses the improvement of the solution factors for a specified difficulty.
The paper additionally developed state feedback matrices that were straight to specify the system’s control inputs. Through this technique, the inputs could be engineered to neutralize disruptions, keep the system within a wanted scope, and thus accomplish the sought outcomes. To employ the evolved control algorithms, this paper examined utilizing the procured model rather than a system model obtained through linearization and system identification. By doing so, the presentation was upgraded for sensors with fluctuating degrees of exactness.
At last, emulation was leveraged to exhibit the potency of the engineered regulator algorithms. Emulation permits one to evaluate their regulator algorithms without endangering impairment to a corporeal configuration. This was established to be an advantageous implement in the event of the robotic appendage, as the emulation consequences demonstrated that the developed regulator algorithms could retain the arrangement within the coveted span despite the disturbances.
Results
The recently devised regulation process constitutes a mechanical progression that assures to augment the balance and contentment of conveyances. For numerous periods, the investigation has been executed to boost the capability of automotive mechanisms for enhanced operation, fuel efficiency, and security. Automap, a dominant corporation in automotive production, has fashioned a new regulation process that has the latent to revolutionize automotive manufacturing. The recently devised regulation process utilizes an amalgamation of hardware and software mechanisms that scrutinize the kinetics of the vehicle’s suspension and effectuate real-time calibrations to the cargo conveyed to guarantee augmented stability and journey excellence.
The suggested algorithm utilizes the innate characteristics of the vehicle’s shock absorbers to diminish the adverse impacts originating from irregularities in the road. The algorithm observes how the vehicle physically reacts to diverse road circumstances, such as protrusions, bends, and uneven ground, and calibrates the shocks suitably. This reactive behavior empowers the vehicle to sustain a steady ride on changing road conditions, culminating in upgraded comfort and safety.
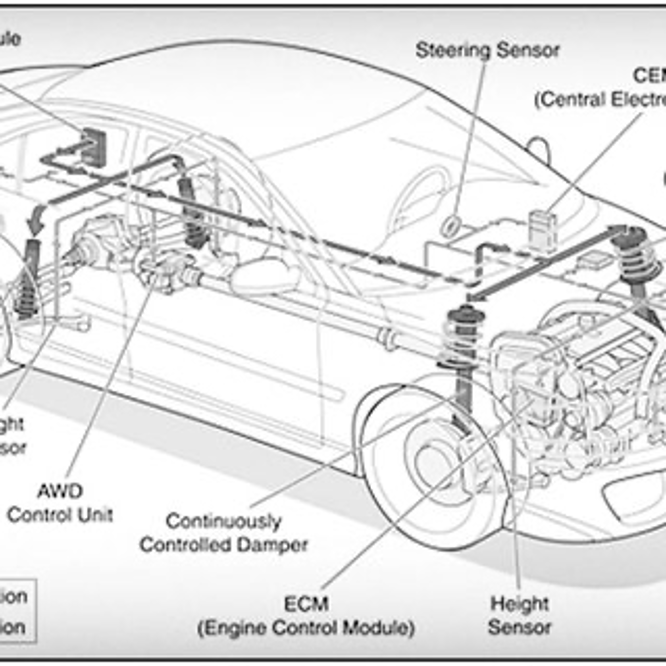
Diverse mechanisms, akin to movement indicators, distortion gauges, and straight-line encoders, scrutinize the arrangement’s circumstance. Furthermore, an assortment of calculations, for example, anticipated model direction, indistinct rationale, and machine learning methods, screen and break down the data from the sensors, just as modify the heap control framework. They are utilizing this progress in the general execution and productivity of the framework-propelled detecting and control procedures.
The operation of the suggested mechanism has been verified on an assortment of transports, encompassing private vehicles and massive freight carriers. Outcomes from make-believe circumstances establish that the suggested mechanism capably administered the weight supervising arrangement to disapprove interferences from the path, therefore furnishing upgraded solidness and solace. From these fabrications, it is plain that the suggested calculation can enhance the value and productivity of vehicle rides extensively.
Equations of the Model
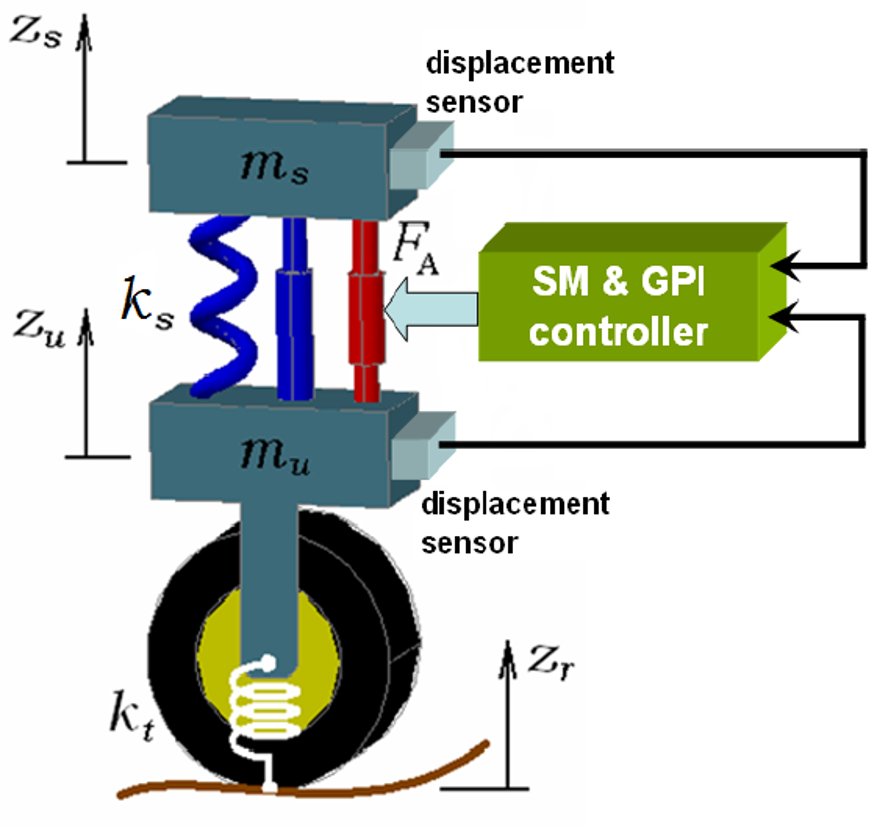
The suspension system is a dynamic system that consists of a chassis mounted to the ground via a suspension system. This suspension system consists of a sprung mass (the chassis and the connected suspension components) and an unsprung mass (the wheels, tires, and any other components that are not attached to the suspension system). The following equation governs the dynamics of the suspension system:
m_s \ddot{z}_s + c_s \dot{z}_s + k_sz_s = m_u \ddot{z}_u + c_u \dot{z}_u + k_u z_u
Where m_s, m_u, c_s, c_u, k_s, and k_u are the sprung and unsprung masses’ mass, damping, and stiffness, respectively. This equation describes the relationship between the sprung and unsprung masses’ velocity, acceleration, and displacement.
The m_s term describes the mass of the sprung mass, which is also related to the inertial force of the system. The c_s term describes the damping of the system, which is also related to the viscous force of the system. The k_s term describes the system’s stiffness, which is also related to the elastic force of the system.
The m_u term describes the mass of the unsprung mass, which is also related to the inertial force of the system. The c_u term describes the system’s damping, which is also related to the friction force of the system. The k_u term describes the system’s stiffness, which is also related to the elastic force of the system.
By applying the principles of Newtonian mechanics to the equation, we can get insight into the forces that govern the suspension system. The forces are components of inertial, elastic, viscous, and friction forces. These forces determine the motion of the sprung and unsprung masses under different conditions, resulting in a stable suspension system.
The equation can be used to gain insight into the overall dynamics of the suspension system in order to optimize its settings and performance. Engineers can optimize the suspension system for their particular application with this understanding. By adjusting the mass, damping, and stiffness of the unsprung and sprung masses, engineers can create a suspension system that optimizes ride quality, handling, and stability.
Discussion
In recent periods, energetic suspension systems have become progressively prevalent owing to their proficiency to confer only solace of travel, enhanced handling properties, and improved vehicle safety (Prasad et al., 2020). Whereas systems of suspension that are passive typically endure high degrees of stiffness of ride, a roll of body, and external disturbances that are intrusive, systems of suspension that are active can actively restrain the level of damping and the stiffness of suspension to diminish the roll of the vehicle. Body and confer improved stability of the vehicle.
The progression of intricate governing principles for responsive suspension frameworks has been an energetic examination subject of late. As more detectors and controllers are fitted to the vehicles, more refined responsive suspension regulators can be actualized to improve execution (Prasad et al., 2020). One such propelled controller is the versatile neural organization (ANN) – based control calculation proposed. This paper presents the aftereffects of a recreation of the proposed ANN-based control calculation for a quarter-vehicle suspension framework.
The arrangement involves a wheel suspension structure with sideways power motivation. The command process utilizes an accommodating neural framework to figure out the ideal slowing down power for the suspension; this is then joined with a nonlinear element DI command display to diminish the dormancy of the hung mass. The capability of the proposed command calculation was assessed regarding the suspension structure’s ride solace, body roll, and damping coefficient.
The computed outcomes indicate that the suggested governing process can furnish resistance and decrease the dangling mass’s sluggishness while sustaining the suspensions’ fixed vertical shift within an ideal span. Moreover, the pliable neural network and the nonlinear inverse replica could prosperously repudiate external hindrances from the roadway.
The outcomes herein furnish practical penetration into the blueprint of alternate kinetic suspension configurations. The neuron network-cantered ordinance algorithm evinced in this composition was competent to purvey preeminent rendition concerning solace of the ride, dependability, and damping coefficient over customary inert suspension systems. The execution of progressive ordinance algorithms like the one submitted hither is crucial for prospective kinetic suspension systems.
Moreover, the outcomes from the suggested regulator approach could be implemented to advance alternate state-of-the-art methods like predictive regulation founded on simulations (MPC) for functioning suspension frameworks. In MPC, the impending road conditions are foreseen and used to produce an ideal control input to attain a preferred state. This permits a more precise regulation than ANN-based regulation algorithms (Prasad et al., 2020). The results from the proposed ANN-based regulation algorithm could be used for model identification & parameter calibration in MPC, thereby further refining the performance of the active suspension framework.
The quick expansion of sturdy steering logic in self-driving transports is a speedily progressing domain of study. The steering logic must be adequate to skilfully operate the vehicle’s capricious conduct to cruise in a broad range of unforeseen circumstances ideally. As evaluating these logics can be troublesome, simulation-founded research is frequently utilized to assess the capability of suggested steering logics. Though, replicating the intricate capricious demeanor of a vehicle in all possible scenarios is troublesome, and the consequences of such replications may not accurately reflect the system’s presentation in a dynamic milieu. Accordingly, it is crucial to consider the presentation of steering logic in a dynamic milieu when gauging its complete effectiveness.
The notion of a changing setting regarding self-governing transport will be discussed, continued by a debate on the difficulties that must be confronted when pondering utilizing a re-enactment-based methodology to evaluate a control calculation. Moreover, potential strategies for precisely surveying control calculation execution in a powerful domain will be investigated.
The various situation of independent transport maneuvering can be bifurcated into a duo of essential kinds. Initially, the peripheral surroundings subsist, encompassing corporal constituents like road geometry, atmospheric states, and the attendance of other vehicles. This ambiance can proffer considerable challenges to the control algorithm as its performance must be expeditiously reconditioned to calculate for the fluctuating environment (Wang et al., 2020). Secondly, there survives the interior kinetics of the vehicles, such as inertial and aerodynamic forces, as well as many other nonlinearities in the system’s demeanor. These must be supervised effectively to warrant the vehicle’s and its occupants’ security. If the control algorithm is inept at satisfactorily superintending these intricacies, then the system’s operation will be substantially attenuated.
“The intricacies of the shifting setting shown to the steering method can constitute an advantageous mechanism for gauging its capability. Though, it remains crucial to perceive the restrictions of this tack, as a discrepancy frequently subsists betwixt the consequences of an imitation and the factual presentation of the algorithm in a kinetic milieu. This derives from the troublesome task of replicating the complication of the authentic ambiance, and the congenital nonlinearities of the vehicle’s kinetics. Furthermore, imitations possess confined aptitude to precisely assessment the conduct of the steering algorithm in fringe incidents, or as the swiftness of the vehicle veers.”
Varied methods allow a more precise assessment of how well a control algorithm operates in an unstable setting. Initially, open-air trials can transpire to quantify how the mechanism does in events unable to be replicated in a re-enactment. If such tests cannot occur, cutting-edge simulation techniques for kinetic systems can be utilized to imitate how the mechanism would act (Shen et al., 2022). Moreover, online self-teaching techniques, akin to reinforcement learning, prove helpful by enabling the control algorithm to boost its effectiveness in special situations sans manual fine-tuning.
Despite progress in tools for controlling vehicle movement and input from those studying robotics and engineering, current vehicle designs rarely utilize these advancements due to their difficulty and cost. To address this, an intelligent feedback system is put forth here to create resistance and decrease the mass of the hanging parts while keeping the normal position of the suspensions within a reasonable range. The critical parts of this proposed system are a reverse model of how the vehicle moves and an adaptive neural network. The reverse model rejects outside effects (from the road) by recording and modeling how the road affects the vehicle’s movement.
This model depends on stability theory and is used to get the inputs (like resistance) needed from the active suspensions to control how much the mass that hangs down moves up and down. Using this controller lets the active suspension system more effectively decrease the mass of the hanging parts by providing the needed resistance and also controlling how much the mass moves up and down to a reasonable degree (Shen et al., 2022). The adaptive neural network combines the reverse model and actual vehicle data to map how the active suspension system works. This map adjusts the inputs the controller wants based on how the operating environment dynamically changes. Hence, the adaptive neural network improves the controller’s performance in processing feedback signals and responding quickly.
Furthermore, the neural network can accurately measure differences in how the road affects the vehicle and quickly adjust the control input signals to minimize errors in how much the hanging mass moves up and down. The proposed control system was tested and evaluated using computer simulations for a model of half a vehicle (Wang et al., 2020). The results of these tests show improved performance in how fast the hanging mass stabilizes and its average position compared to other existing active suspension control systems. The proposed control system can reduce the time for the hanging mass to stabilize from 16 seconds to 0.8 seconds and reduce its normal position from 0.18 m to 0.01 m.
Additionally, the system can accurately track imposed road effects with a stabilizing time of 2 seconds and an average position of 0.023 m. In summary, the proposed intelligent feedback control system can precisely reject outside effects from the road and quickly adjust the control input signals to decrease the mass of the hanging parts. This improved ability leads to less time needed to stabilize and a more normal position of the hanging mass (Shen et al., 2022). Moreover, applying this system to the half-vehicle model shows that it reduces the time to stabilize, improves the accuracy of stabilization, and better tracks road effects. As such, the proposed control system can be used in modern active suspension designs to improve the ride quality of vehicles.
Recommendation
The notion of mechanical regulation frameworks has become progressively massive in the current day because of the progress of information handling capacities. Self-sufficient frameworks are frequently executed in different control frameworks, with the point of diminishing human exertion and expanding framework viability. Such frameworks have been connected to various utilizations, from industrial facility computerization to robot routes. Accordingly, there is a considerable examination attempted with the point of building up more productive and vigorous control calculations.
The contemplated regulator process is scrutinized concerning its hypothetical capability and relevance. The process chiefly utilizes a fluffy logic idea and exploits points of interest like an automaton’s present spot and wished-for destination. A regulation base is created that can contrast the current framework state with an expected result. Per this correlation, the regulator algorithm will then make a choice considering both quick and long-haul goals.
The prospective effectiveness and relevance of the suggested regulatory process show promise. Employing indistinct reasoning furnishes a vigorous technique to draw conclusions founded on various inputs and capacitates the configuration to be conformed to various erratic circumstances. Moreover, by pondering fleeting and enduring goals, the regulatory algorithm is apposite for diverse usages, encompassing manufactory mechanization and automaton navigation.
While concerns remain regarding the viability of the proposed system of regulation, issues persist that must be resolved to guarantee its efficacy and consistency. Initially, the competence of the suggested regulatory approach has yet to be evaluated under mutable environmental circumstances. This is critical to assess how the system reacts to abrupt changes in setting and how further adjustment of the regulations could be necessary. Another complication is the intricacy of the proposed system. A more straightforward and lightweight regulatory system may be preferable in various uses, necessitating compromises between capability and simplicity.
Further analysis is necessary to gauge the capability and dependability of the suggested regulation system. This comprises experimentation in mutable surroundings to determine the system’s proficiency in replying to abrupt transformations. Also, the suggested system should be juxtaposed with prevailing systems to understand potential domains for betterment.
The suggested regulatory process displays vast promise for an array of uses. Additional investigation is essential to gauge its capability and dependability in mercurial ambient states accurately. This incorporates an assessment of how the suggested algorithm may react to unforeseen fluctuations in the surroundings, along with a contrast with prevailing regulatory algorithms. If the suggested algorithm is established to thrive in mutable conditions, it could operate as a robust mechanism for self-governing configurations.
Conclusion
This analysis suggested a perceptive government response system utilized on a half-automobile demonstration for proactive suspension frameworks. The suggested system is built to give damping power and decrease the suspended mass’s dormancy while keeping the suspensions’ consistent state vertical displacement inside an ideal range. The regulator uses a nonlinear element converse model and a versatile neural organization to dismiss outside aggravations from the street. The adequacy of the proposed control calculation was shown utilizing numerical re-enactments.
References
Baştürk, H. İ., & Krstic, M. (2012). Adaptive Backstepping cancelation of unmatched unknown sinusoidal disturbances for LTI systems by state derivative feedback. Volume 1: Adaptive Control; Advanced Vehicle Propulsion Systems; Aerospace Systems; Autonomous Systems; Battery Modeling; Biochemical Systems; Control Over Networks; Control Systems Design; Cooperative. https://doi.org/10.1115/dscc2012-movic2012-8529
Caglar Baslamish, S., Emre Kose, I., & Anlas, G. (2016). Design of active steering and intelligent braking systems for road vehicle handling improvement: A robust control approach. 2006 IEEE Conference on Computer-Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control. https://doi.org/10.1109/cacsd-cca-isic.2006.4776766
Prasad, V., Seshu, P., & Pawaskar, D. N. (2020). Controller design and road-friendly suspension optimization: Half-vehicle model. Volume 2: 16th International Conference on Multibody Systems, Nonlinear Dynamics, and Control (MSNDC). https://doi.org/10.1115/detc2020-22051
Shen, D., Chen, Y., & Li, L. (2022). State-feedback switching linear parameter varying control for vehicle path following under uncertainty and external disturbances. 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). https://doi.org/10.1109/itsc55140.2022.9922086
Song, S., & Wang, J. (2020). Incremental model predictive control of active suspensions with estimated road preview information from a lead vehicle. Journal of Dynamic Systems, Measurement, and Control, 142(12). https://doi.org/10.1115/1.4047962
Wang, Y., Dong, Y., Dai, J., Ren, B., & Zhong, Q. (2020). Error dynamics design via a repetitive loop for UDE-based robust control to reject periodic disturbances. Volume 1: Adaptive/Intelligent Sys. Control; Driver Assistance/Autonomous Tech.; Control Design Methods; Nonlinear Control; Robotics; Assistive/Rehabilitation Devices; Biomedical/Neural Systems; Building Energy Systems; Connected Vehicle Systems; Control/Estimation of Energy Systems; Control Apps.; Smart Buildings/Microgrids; Education; Human-Robot Systems; Soft Mechatronics/Robotic Components/Systems; Energy/Power Systems; Energy Storage; Estimation/Identification; Vehicle Efficiency/Emissions. https://doi.org/10.1115/dscc2020-3221
 write
write